 1 / 3
1 / 3Harvest robot




Prix matériel:
Poids
Léger
Constitution
Insensible à la saleté
Modularité
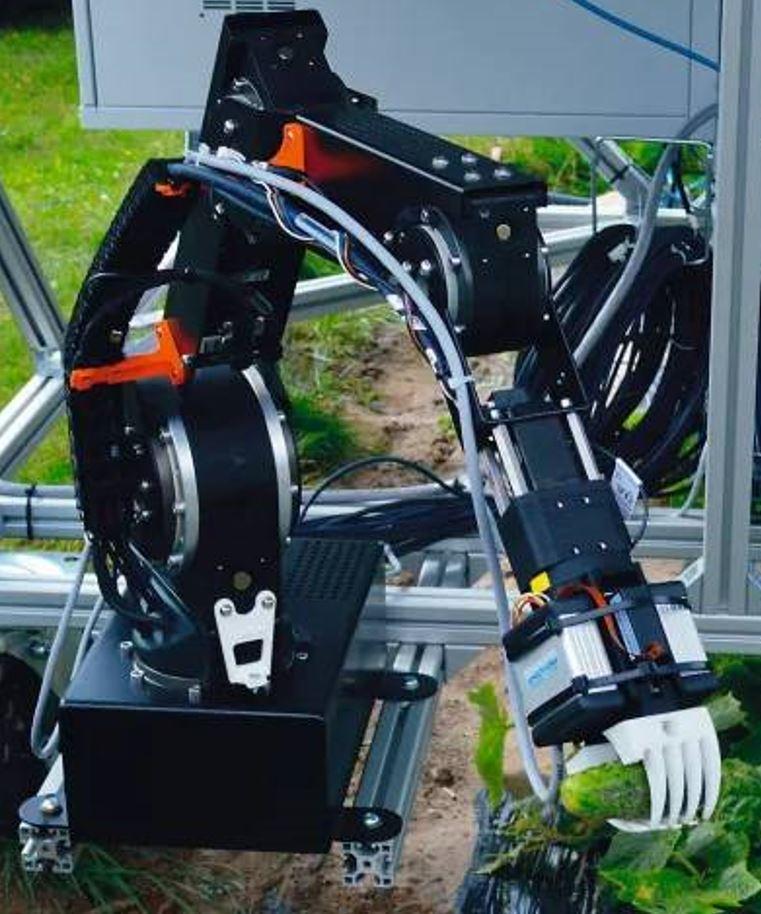
The prototype Catch was developed within a short research project of 18 months to assist in cucumber harvesting. Especially the seasonal and short-term harvesting work, is often considered unattractive, which is why there is a labor shortage. This is exactly why automation plays an important issue in agriculture. With the support of robots, harvesting work can be done faster. Cucumber harvesting in particular is a difficult and challenging task, as the robot must recognize a green object in a green and covered environment. The Catch was already able to meet these requirements with the help of two Robolink robots from igus, but the development still requires further research and improvements so that the recognition and separation of cucumbers can be further improved in order to offer an efficient and marketable product.
1 composant








